
Почему 3D BELT PICK и SICK TriSpectorP?
3D Belt Pick - это простое в использовании решение с 3D-датчиком изображения для роботизированного захвата объектов с конвейерной ленты.
Благодаря интуитивно понятному веб-интерфейсу и простой процедуре регулировки «рука-глаз» вместе с инструментом Belt Pick URCap обеспечивается легкая интеграция с роботами UR.
Основные функции и особенности системы
- Точное и надежное обнаружение продуктов благодаря независимой от контрастности визуализации, которая, например, позволяет обнаруживать темные продукты на темном конвейере
- Бережное и аккуратное обращение с продуктом благодаря информации о габаритах (высоте) из 3D-данных
- Простая настройка - обнаружение на основе 3D позволяет использовать всего лишь несколько параметров и часто всего одну конфигурацию для многих типов продуктов
- Легкое регулирование взаимодействий (калибровка) между роботом и камерой
- Интуитивно понятный веб-интерфейс для калибровки, настройки и мониторинга
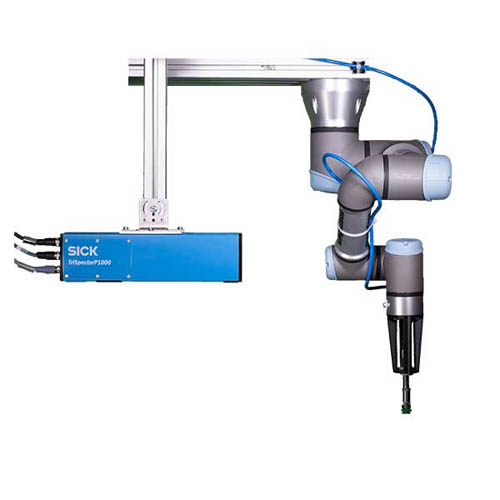
Как это работает
Камера TriSpector с программным обеспечением Belt Pick работает как автономный датчик захвата ленты (конвейера). TriSpector обнаруживает и локализует продукты, которые проходят по конвейерной ленте, и затем отправляет 3D-координаты продукта и его ориентацию в контроллер Universal Robot.